
Final Presentation
Link to the Final Presentation Powerpoint
https://drive.google.com/open?id=1Ju27sv4d0fn9XEXEEzdfgXTnQAxwXa8bxcqvQIeuum4
Battery Indicator
A battery indicator was created and soldered on to a PCB board. It was successfully tested using a power supply.
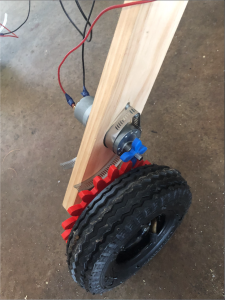
New Motor/Wheel Design
Date: April 15th
Since the motors struggled to turn the robot, Dean and Hamza redesigned the legs using gears to give the wheels higher torque. The gears were 3D printed throughout the week and fitted to the motor and a ball bearings. As seen in the video above the method was successful and the robot can turn easily. The current issue is the gears easily slide out of place from one another causing some of the wheels not to function at times. The gears are being redesigned to prevent this slipping.
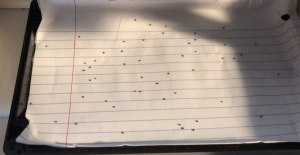
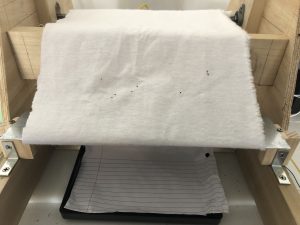
Collection System: Update and Testing
Date: April 14
On April 14, Harris and Justin successfully implemented and altered the Collection System design to more efficiently remove the poppy seeds from the cloth. Common issues such as the stepper motors getting stuck, the cloth getting stuck, and the blades not removing the poppy seeds were quickly addressed and fixed. The collection system also included the rework of some of the coding for the stepper motors so that the timing of the two stepper motors would match. Minor testing was also completed at this time.
Collection System Test 1 (Top Cloth)
 .
. 
Collection System Test 2 (Bottom Cloth)
Experimental Data:
| Trial 1 (Top of Cloth) | Trial 2 (Bottom of Cloth) | Trial 3 (Bottom of Cloth) | Trial 4 (Top and Bottom of Cloth) | |
| # of Poppy Seeds on the cloth | 30 | 10 | 10 | 20 |
| # of Poppy Seed Removed | 25 | 9 | 8 | 17 |
| # of Poppy Seeds left on the cloth(top) | 5 | 1 | ||
| # of Poppy Seeds left on the cloth(bottom) | 1 | 2 | 2 | |
| # of Poppy Seeds left (total) | 5 | 1 | 2 | 3 |
| Success Rate
(#Removed/#Poppy Seeds) |
83% | 90% | 80% | 85% |
Collection System Nema 17 Motor Mount
Date: April 13
On April 13, Team members Harris and Justin worked on mounting the new Nema 17 stepper motor onto the collection system.![]()
![]()
![]()
![]()
![]()



![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
Collection System: Update
Date: April 11
The 28BYJ-48 stepper motors were replaced with the Nema 17 Bipolar stepper motors. The new stepper motors required the use of 2 L298N Dual Motor Controller Module, one for each motor. The existing code was modified to work with the new controller module and the winding and unwinding of the cloth was tested.
Collection System Design 2: Metal Scrape
On April 3rd…
On April 3rd, collection system design 1 was modified into design 2. Collection system design 2 is comprised of design 1 with an extra stepper motor and two metal plates attach to the wood and bent in 45 degree angle. Team member Dean was in charge of placing and securing the two stepper motors. Team member Justin was responsible for assembling the bent metal plates and screwing it to the wood piece. Team member Harris was assigned assign for assembling and attaching the rod to the stepping motor.
Design 2: Wood Bot Maneuverability Testing
Date: March 30, 2019
On March 30th, testing of body design 2 was complete. Since there was no changes in wiring or components from body design 1, coding and components were carry over to second body design. After transition from PVC pipes to wood, we conclude that the body design 2 is more stable and sturdy in test trial although the motors and wheels were securely attach, the turning mechanic does not function properly due to a lack of power supply from the motors. In ordering to resolve this issue, we decided to implement a gear ratio design to increase power to wheels. Team member Dean was in charge of designing the 3D-printed model of the gears and how to implement it in the wheel design.
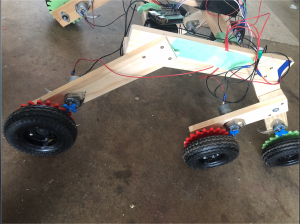
Design 2: Wood Body
Date: March 24,2019
On March 24th, our initial PVC pipe body design was not sturdy enough to substantially support the weight of the base which contained the batteries, electrical components, and collection system. Therefore, we decided to take an alternative approach by using wood to be more stable. In order to reconstruct the robot with the wood design, each member of the team was assign a task to build a section of the robot. Team member Dean was in charge of the front four wheels. Team members Harris and Hamza was in charge of the base and drilling to new holes to secure the legs. Team member Justin was responsible for the last two legs. Once each team member complete their assigned tasks, us four members then work together to assemble each body part. 
PVC Design 1: Keyboard Coding and Maneuverability Test
Date: March 21, 2019
On March 21st, our team decided to use a wireless Bluetooth keypad for testing purposes to control the Robot. The keypad mapped specific buttons to delegate the direction of the robot such as forward, reverse, left, right, as well. Buttons were also mapped in order to stop the robot as well as control the collection system. The key mapping code was written in python, by team member Justin, to control the direction of the motors. Once the coding for the robot was completed, Justin and Dean moved on to the wiring of the Raspberry Pi 3 to the motors. Team Members Hamza and Harris was delegated to wire up the battery and ensure all connections are secured. Team Member Dean was in charge of soldering the wires and the team as a whole double checked all wiring connections to ensure they were secure.