
Collection system, Wheel attachment and Motor Demo





Click here for video demo of motor operating wheel
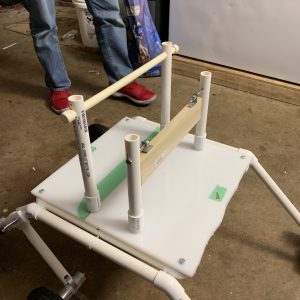
On the days February 24th and March 2-3rd, various components were mounted and tested. First was the mounting of an approximately 1/2 inch thick sheet of HDPE (High Density Polyethylene) sheet to the base whose main purpose is to serve as steady/strong base for the electrical components and collection system. Following this, a portion of the collection system was also mounted to the base. The wheels and motors were secured to the legs of the robot as well. This was done using metal clamps to secure the attached motor and wheel to the PVC piping. Finally, a demo of the motor causing the wheels to rotate was conducted in which case it was a success. An issue we have encountered at this point is that of the body being somewhat unstable once the wheels and motors were attached. Future tasks to be completed would include securing the body by applying some sort of adhesive or glue to the connections of the PVC piping, operating all six wheels of the robot at once in order to demonstrate and test the movement of the robot, finalizing the construction of the capture system and adding electrical components to the base and frame.
“Body” Building Cont. and Stepper Motor Testing

Click here for video demo of stepper motor rotation
On February 10th, the legs and body were secured together as well as the coding and functioning of the stepper motor. The body had 1 screw securing the leg on one side while having 2 screws on the other in order for the rocker bogey suspension to still be functional while also keeping the body secure. The programming and testing of the stepper motor was successful in rotating both clockwise and counter clockwise with a customizable angle of rotation. This stepper motor’s main function would be the winding and unwinding of the cloth for the collection system. The upcoming tasks include programming and attaching the motors, securing the wheels to the body and also adding a protective plastic housing to the base in order to protect the electrical components when attached.
“Body” Building


click here for video of PVC cutting
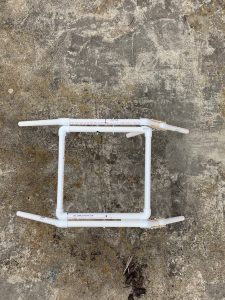
On February 3rd, the prototype body of Robot Tick was cut and created out of PVC piping. The square base measure 16 inches on each side while the overall height of the robot (legs and wheels included) is 14 inches. The rocker bogey suspension responsible for the robot’s elevated terrain capabilities was also added to the legs. The future course of action includes securing the legs to the base, programming/testing/attaching the motors and adding a sturdy material to house the electrical components onto the base.
Tick Removal Tool
Conducted November 28th, 2018
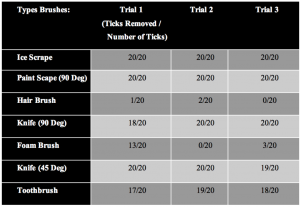
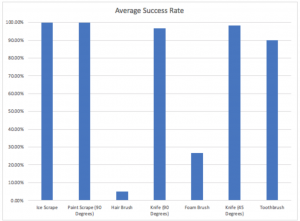
In this experimentation, we tested different type of blades to remove poppy seeds on a cloth, in order to simulate the removal system of the robot and test which blade works best. The experiment was done using 20 poppy seeds and three trials. The data was collected and shown in the table below of how many poppy seeds the blade successfully removed over how many poppy seeds present.

Servo Testing

On November 7th we tested a servo module using Raspberry Pi(this Microcontroller will not be used in final design). One servo would contribute to the steering mechanism of the robot and another utilized in the tick collection system. This servo only moves from 0 to 180 degrees in either clockwise or counterclockwise direction but by further developing on the code this servo can utilize the full 360 degrees. This is a plausible component in our design in regards to turning the actual robot and as well as retracting the cloth that collects ticks.
Tick Drag

On October 1st, the team conducted tick drag trials alongside Dr. von Fricken in order to understand how a traditional tick drag was conducted. The team captured ticks by dragging the same cloth that tick researchers would use and tested various brushes, blades and other tools in order to remove said ticks. The conclusion the group came up with included a design that with utilize a sharp blade in order to extract the ticks since it was the best at removing them from the cloth.