
New Motor/Wheel Design
Posted by hkhalid2 on April 15, 2019
Filed under Uncategorized
Date: April 15th
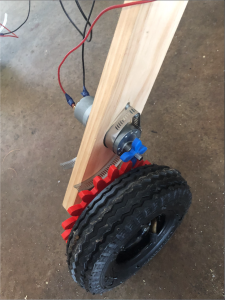
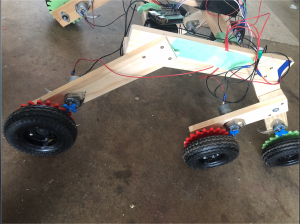
Since the motors struggled to turn the robot, Dean and Hamza redesigned the legs using gears to give the wheels higher torque. The gears were 3D printed throughout the week and fitted to the motor and a ball bearings. As seen in the video above the method was successful and the robot can turn easily. The current issue is the gears easily slide out of place from one another causing some of the wheels not to function at times. The gears are being redesigned to prevent this slipping.
Comments
Leave a Reply